La théorie de la régulation et du contrôle est divisée en deux parties principales, à savoir classique et moderne. La mise en oeuvre des conceptions du contrôleur classique par rapport aux systèmes conçus qui utilisent une théorie du contrôle moderne est plus simple et dans la majorité des applications industrielles, elle est décidée par ces contrôleurs. Les contrôleurs conçus les plus courants qui utilisent la théorie du contrôle classique sont les contrôleurs PID.
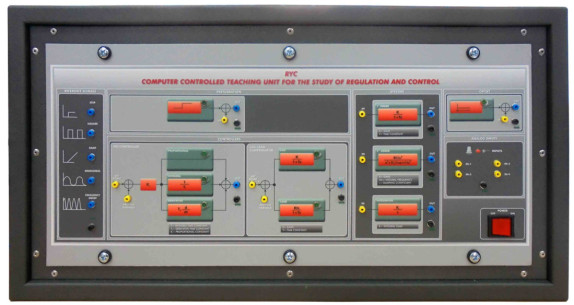
L’Équipement Modulaire de Contrôle et de Régulation, Commandé par Ordinateur (PC), "RYC/T", permet aux étudiants de simuler un système intégrateur, un système de premier ordre et un système de second ordre, en plus de les réguler à l’aide d’un contrôleur ou d’un compensateur PID. d'avance et de retard. L'équipement permet également de simuler des perturbations et des compensations pour analyser la réponse du système.
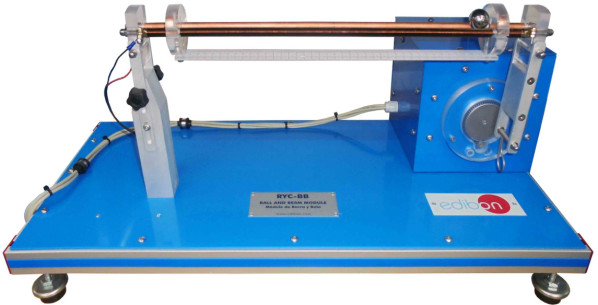
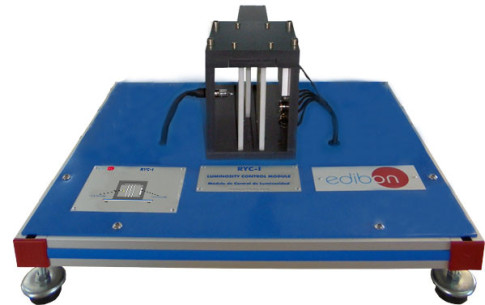
Pour travailler avec l'équipement, une grande variété d'applications sont disponibles pour l'utilisateur: module de servomoteur CC, module de barre et boule, etc. étudier un processus réel dans le but de compléter l'étude de la régulation et du contrôle en temps réel.
Cette Unité Contrôlée par Ordinateur est fournie avec le Système de Contrôle par Ordinateur EDIBON (SCADA), et comprend: l'Unité elle-même + un Boîtier d'Interface de Contrôle + une Carte d'Acquisition de Données + des Progiciels de Contrôle par Ordinateur, d'Acquisition de Données et de Gestion de Données, pour contrôler le processus et tous les paramètres impliqués dans le processus.
 Préférences sur les cookies
Préférences sur les cookies

 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours