La Application des Véhicules Hybrides et Électriques, Contrôlée par Ordinateur (PC), "AEL-EHVC", a été conçu par EDIBON pour faciliter la compréhension et l’analyse des technologies clés utilisées dans les véhicules électriques et hybrides dans le contexte de la mobilité électrique actuelle.
Étant donné la grande diversité de configurations de véhicules électriques et hybrides pouvant être étudiées, cette application a été développée sous un format modulaire, permettant à l’utilisateur, étudiant ou chercheur, d’implémenter la topologie souhaitée. Cette caractéristique constitue un avantage compétitif par rapport à d’autres systèmes du marché, en permettant une comparaison réelle entre différentes configurations en termes de fonctionnement, d’efficacité et de dynamique opérationnelle.
L’application "AEL-EHVC" se compose essentiellement de trois parties :
- Véhicule 100 % électrique (inclus) : Composé d’un ensemble de modules permettant d’étudier le comportement d’un véhicule entièrement électrique, incluant le moteur de traction, le simulateur de terrain, le variateur de fréquence et une source de courant continu régénérative.
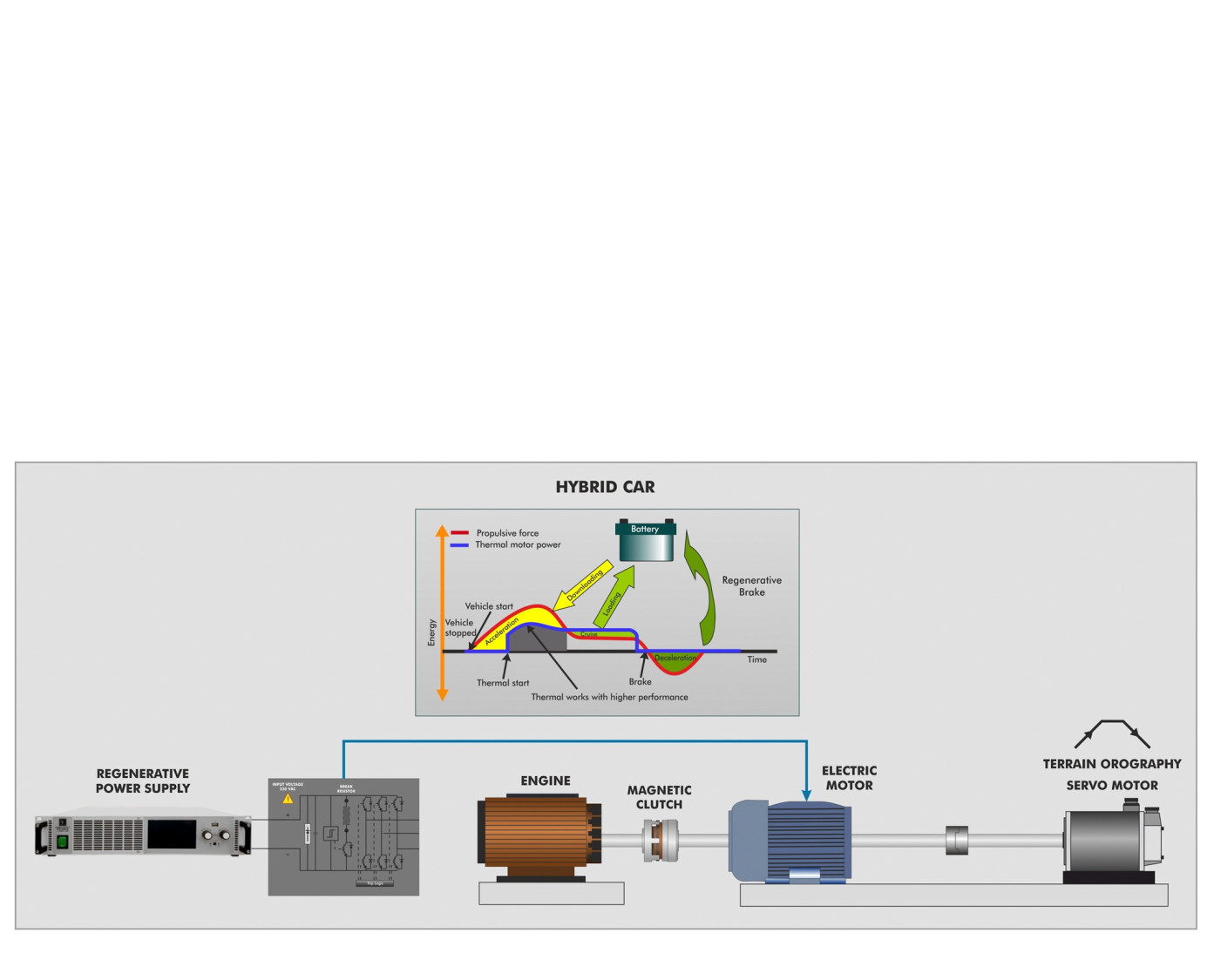
- Véhicule hybride (recommandé) (Non inclus) : Composé d’un servomoteur avec embrayage magnétique, capable de reproduire le fonctionnement d’un moteur à essence en interaction contrôlée avec le moteur électrique principal.
- Point de recharge de véhicule électrique (recommandé) (Non inclus) : Système de recharge réel, identique à ceux utilisés dans les stations de service, permettant d’étudier le processus de recharge d’un véhicule électrique.
En raison du fort potentiel de cette application, les deux topologies de véhicules pouvant être configurées sont détaillées ci-dessous, ainsi que les capacités du logiciel de supervision et de contrôle SCADA inclus :
Éléments inclus :
La topologie de véhicule 100 % électrique intègre tous les éléments nécessaires pour simuler un véhicule électrique réel :
- N-DCPWS/R. Module d’Alimentation CC Régénérative : simule le comportement de la batterie de traction.
- N-RGTR. Module de Transmission Régénérative : régule la vitesse et le couple du moteur électrique.
- EMT7B/1K-E. Moteur Industriel à Cage d'Écureuil 3PH, 1 kW, 4 pôles : émule le système de traction principal.
- Servomoteur d’Orographie : couplé à l’arbre du moteur, il permet de simuler des conditions de montée, de descente et de terrain plat.
Grâce à la simulation de différentes pentes, l’utilisateur peut observer les principes de conversion entre énergie électrique et mécanique, en modes traction (montée) ou régénération (descente).
Le système intègre un ensemble de pédales d’accélérateur et de frein réels, permettant de gérer de manière pratique les phases d’accélération, de décélération et de freinage régénératif.
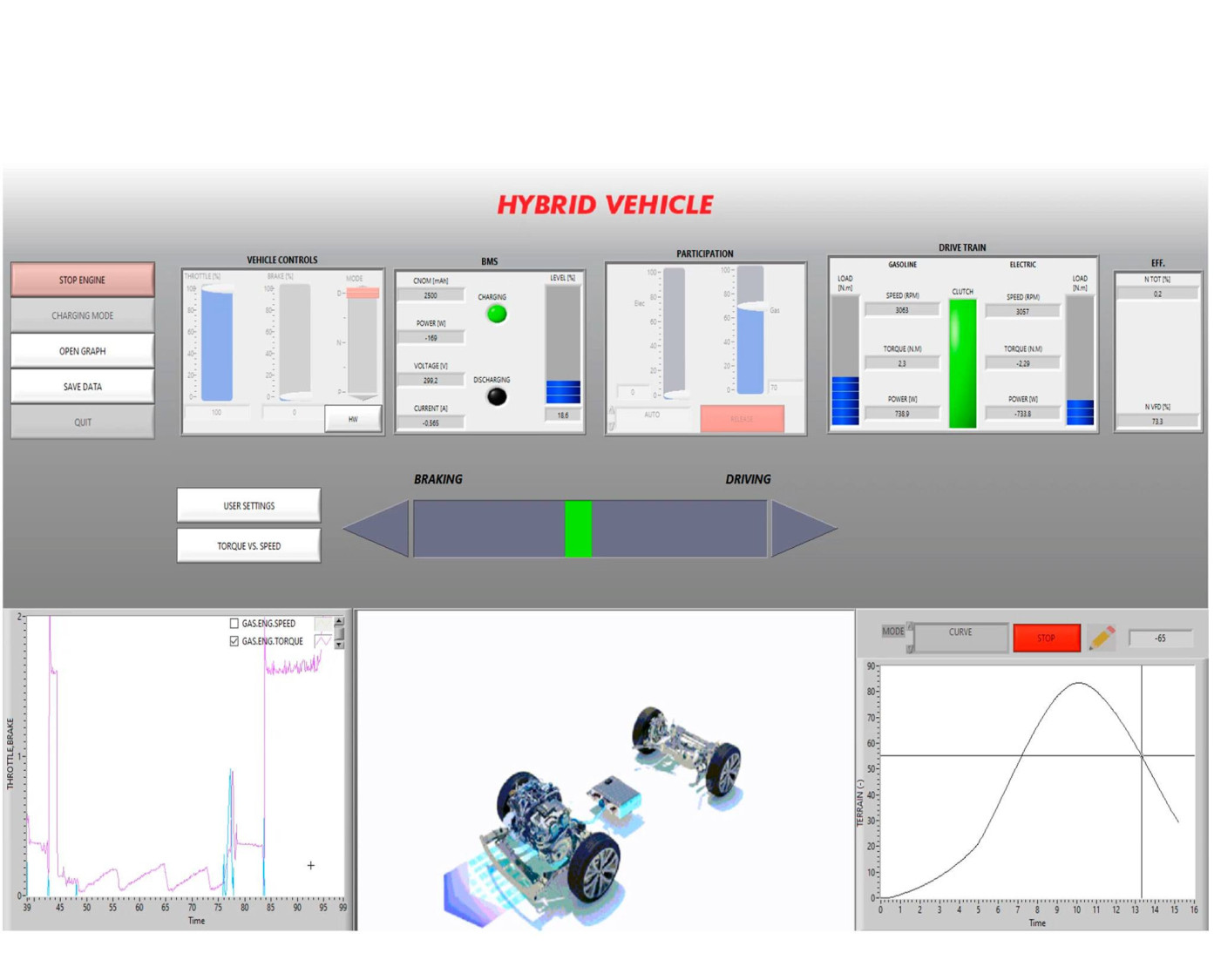
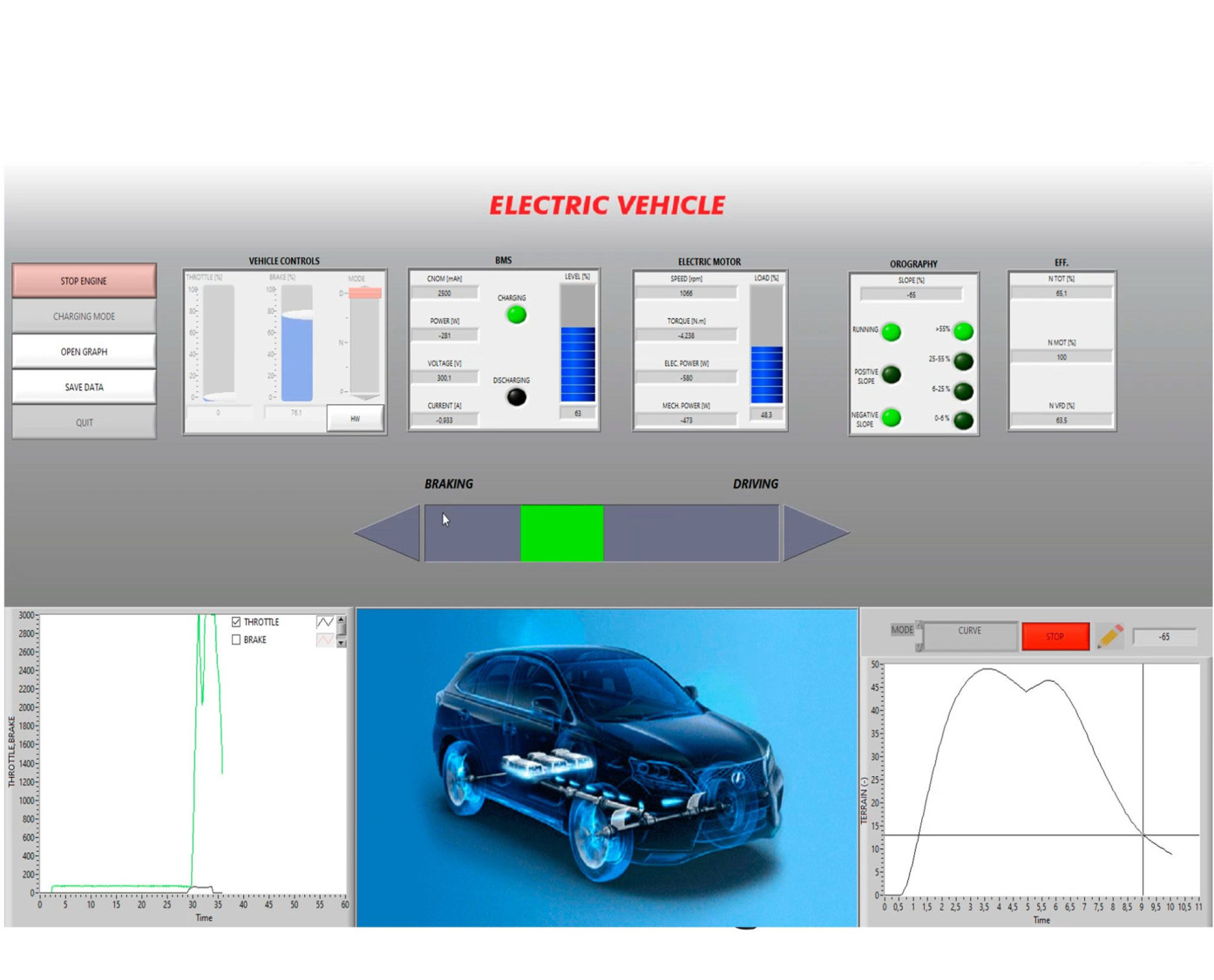
Le puissant logiciel SCADA se distingue, permettant de modéliser différents types de batteries en configurant des paramètres essentiels tels que :
- Capacité en ampères-heures (Ah).
- Tensions de charge en phases bulk, absorption et float.
L’utilisateur peut analyser les flux de puissance de charge et de décharge dans un tampon d’énergie virtuel, reproduisant de manière sûre le comportement d’une batterie lithium réelle aux différentes étapes de charge.
 Préférences sur les cookies
Préférences sur les cookies














 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours























{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}