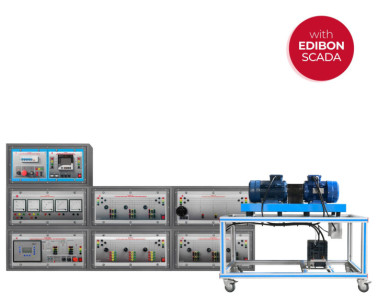
L’Unité de Servosystèmes Industriels (moteurs CA) Avancée, Contrôlée par Ordinateur (PC), "SERIN/CA", a été conçue par EDIBON pour l’étude approfondie des trois principaux modes de contrôle utilisés dans les servomécanismes : le contrôle de position, le contrôle de vitesse et le contrôle de couple.
Le contrôle de position permet de déplacer les charges entre des points définis avec une grande précision, le contrôle de vitesse régule la vitesse de rotation ou de déplacement en fonction du temps, et le contrôle de couple garantit une force de rotation constante, essentielle dans les applications à charge variable.
L’accès pratique à ces trois modes permet aux étudiants d’acquérir des connaissances concrètes sur leur mise en oeuvre dans des systèmes d’automatisation réels.
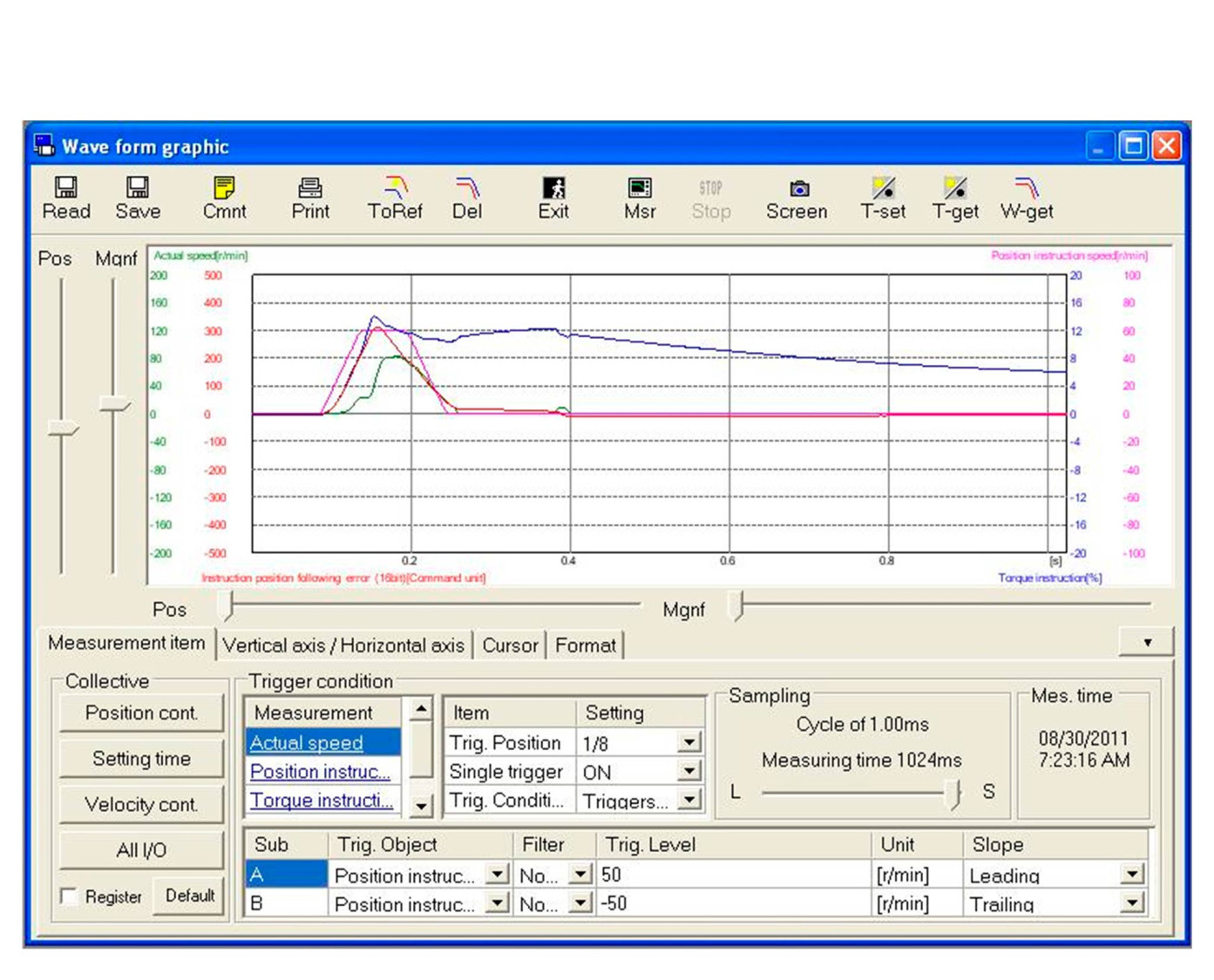
Avec le "SERIN/CA", les étudiants peuvent observer en temps réel l’application de ces principes en expérimentant différents modes de contrôle et configurations du système.
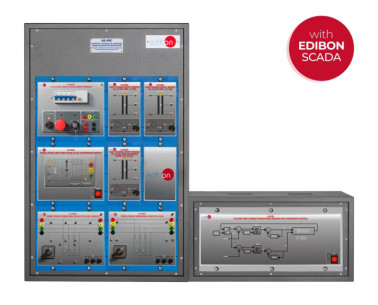
Pour faciliter l’apprentissage pratique, le "SERIN/CA" comprend les modules suivants, qui simulent et contrôlent différents éléments d’un véritable système servo :
- Émulateur de codeur (encoder) : fournit des signaux de rétroaction pour le contrôle de position via les canaux A, B et Z.
- Potentiomètres analogique et numérique : permettent des pratiques de contrôle de vitesse (PTC1) et de position (PTC2).
- Entrées et sorties numériques : 6 entrées et 3 sorties permettant de modifier les fonctions du système et d’en visualiser l’état.
- Entrées et sorties analogiques : utilisées pour le contrôle de la vitesse, du couple et pour la rétroaction de signaux.
- Interrupteurs et boutons-poussoirs numériques : pour activer des entrées ou interagir avec des systèmes externes tels que les automates programmables (API/PLC).
- Sortie relais : utilisée pour générer des alarmes ou contrôler des dispositifs externes.
- Bouton de réinitialisation : permet de redémarrer le système et de charger de nouveaux paramètres depuis le logiciel.
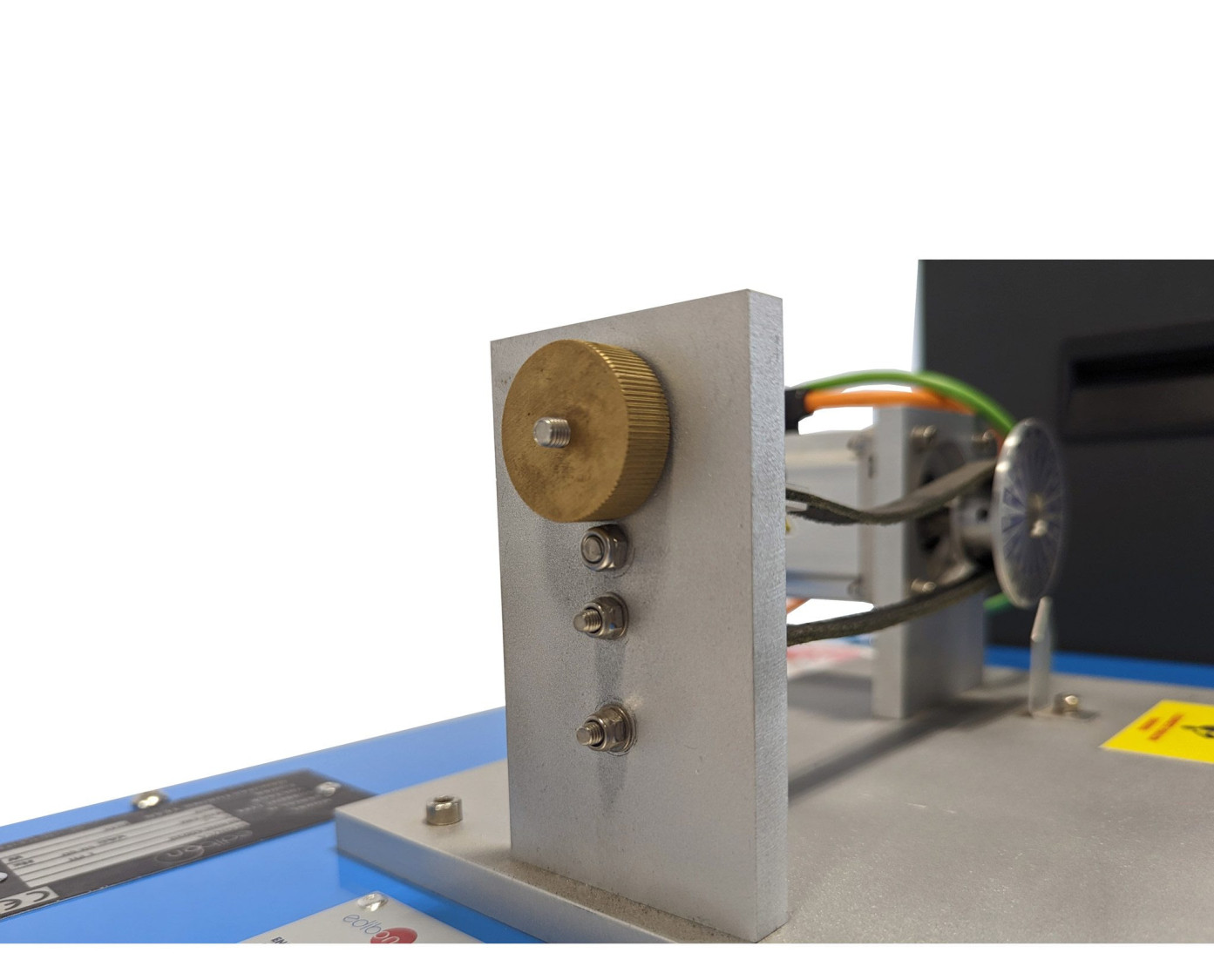
- Moteur CA avec frein : le frein réglable simule différentes conditions de charge pour rendre les expériences plus réalistes.
Grâce à son architecture et son environnement contrôlé par ordinateur, l’unité permet de réaliser un large éventail de pratiques, des exercices de base aux applications avancées de contrôle en boucle fermée.
Elle constitue une solution idéale pour les centres de formation professionnelle, les universités et les institutions techniques à la recherche d’un système robuste, polyvalent et entièrement axé sur la pratique.
 Préférences sur les cookies
Préférences sur les cookies
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours












 - SERIN/CA")
{kind=link}
{kind=link}