L'Application Industrielle de Servomoteur, "AE-SMI", est conçue pour effectuer jusqu'à sept commandes utilisées dans la technologie du mouvement : commande de position, commande de vitesse, commande de couple, commande de position et de vitesse, commande de vitesse et de couple et commande à fermeture totale (position , contrôle de la vitesse et du couple en même temps). L'application "AE-SMI" permet à l'étudiant de configurer tous les paramètres impliqués dans ces contrôles, tels que régler les paramètres de contrôle PID, effectuer un auto-réglage des paramètres de contrôle, régler la limite de couple, régler la limite de vitesse, régler le type de signal de commande d'entrée, configurer les alarmes, définir la position d'origine, l'accélération et la décélération du système lorsqu'il s'approche de la position, de la vitesse ou du point de couple souhaités et d'un long etc.
L'application "AE-SMI" est un système informatisé. L'ordinateur est utilisé pour configurer et surveiller la réponse et l'état du système de contrôle du servomoteur, permettant la visualisation de la position actuelle, de la vitesse et de la valeur de couple dans un graphique personnalisable en fonction du temps, l'état des signaux d'entrée et de sortie numériques et analogiques, le type de contrôle choisi, etc.
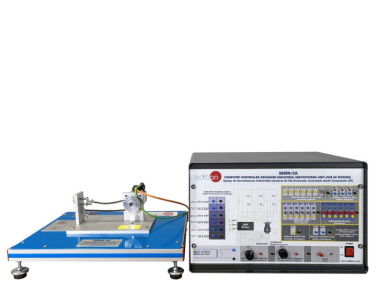
L'Unité de Base du Servomoteur, "SMI-UB", est l'unité de base du "AE-SMI", et il existe une large gamme d'applications supplémentaires disponibles, étant au moins l'une d'entre elles nécessaire pour travailler avec le "SMI -UB". Les applications supplémentaires disponibles sont de véritables exemples de systèmes industriels : servomoteur avec frein réglable, servomoteur dans un système d'axe linéaire, servomoteur dans un système à bande transporteuse, servomoteur dans un système à table rotative et servomoteur dans une presse mécanique.
Le "SMI-UB" permet également à l'étudiant de travailler avec un automate programmable, PLC. Le PLC reçoit les signaux des différents capteurs installés dans chaque application supplémentaire et contrôle le système d'asservissement via des signaux numériques et pulsés, permettant l'ajout d'un contrôle PLC à un système de servomoteur.
Les éléments inclus dans l'unité "SMI-UB" :
• N-ALI02. Module d'Alimentation Principale Doméstique.
• N-SMI-DRV. Pilote de servomoteur.
• N-MD-MT. Module de test de pilote de moteur.
Élément requis pour fonctionner avec l'unité "SMI-UB" :
• AEL-PC. Ordinateur et écran tactile. PC pour travailler avec l'unité.
Au moins un des éléments suivants est requis pour fonctionner avec l'unité "SMI-UB" :
• SMI-K1. Servomoteur à Frein Réglable.
• SMI-K2. Servomoteur à Axe Linéaire.
• SMI-K3. Servomoteur avec Bande Transporteuse.
• SMI-K4. Servomoteur à Table Rotative.
• SMI-K5. Servomoteur avec Press.
Éléments recommandés pour augmenter la fonctionnalité de l'unité "SMI-UB" :
• AE-PLC-PAN-UB. Unité de Base PLC PANASONIC.
• AE-PLC-SIE-UB. Unité de base PLC SIEMENS.
• AE-PLC-OMR-UB. Unité de Base de PLC OMRON.
• AE-PLC-MIT-UB. Unité de Base PLC MITSUBISHI.
• AE-PLC-AB-UB. Unité de Base PLC ALLEN BRADLEY.
• AE-PLC-SCH-UB. Unité de Base PLC SCHNEIDER.
 Préférences sur les cookies
Préférences sur les cookies

 Catalogue
Catalogue
 Spécifications du Concours
Spécifications du Concours