手册中包含的指导实践练习
Practical possibilities to be done with the Unit for the Study of Regulation and Control (RYC):
- Response of a first order system in time domain.
- Response of a first order system in frequency domain.
- Response of a second order system in time domain.
- Response of a second order system in frequency domain.
- Response of an integrator in time domain.
- Response of an integrator in frequency domain.
- Lead/Lag compensation.
- Structure of a PID controller.
- PID control of a first order system.
- PID control of a second order system.
Additional practical possibilities:
- Response of a first order system in time domain. (Step response).
- Response of a first order system in time domain. (Ramp response).
- Response of a first order system in time domain. (Sine response).
- Response of a first order system in frequency domain. (Sine response).
- Response of a second order system in time domain. (Step response).
- Response of a second order system in time domain. (Ramp response).
- Response of a second order system in time domain. (Sine response).
- Response of a second order system in frequency domain. (Sine response).
- Phase Lead Compensator experiment.
- Phase Lag Compensator experiment.
- Structure of a PID controller. (Proportional-Integrative-Derivative blocks).
- PID control of a first order system in open-loop.
- PID control of a second order system in open-loop.
- PID control of a first order system in closed-loop. (Mathematical tuning).
- PID control of a first order system in closed-loop. (Experimental tuning).
- PID control of a first order system in closed-loop. (Ziegler-Nichols tuning).
- PID control of a second order system in closed-loop. (Mathematical tuning).
- PID control of a second order system in closed-loop.(Experimental tuning).
- PID control of a second order system in closed- loop. (Ziegler-Nichols tuning).
Practical possibilities to be done with the additional recommended elements (Not included), for working with RYC unit:
PID Control and Regulation of a Ball and Beam System Unit (RYCBB):
- DC motor position control with a PID controller.
- Ball and Beam control (RYC-BB) with a lead compensator and a PID controller (cascade control).
PID Flow Control and Regulation Unit (RYC-C):
- Familiarization with the main unit components.
- Analysis of the water flow rate as a function of the proportional valve operation.
- PID control of the water flow rate using the proportional valve (open-loop).
- PID control of the water flow rate using the proportional valve (closed-loop).
- Analysis of the different system responses to changes in the PID parameters.
Additional practical possibilities:
- Analyze the transient response of the system.
- Analyze the system response in open loop.
- Analyze the system response in closed loop.
- Flow rate control with a P, PI, PD and PID controller.
- Setting and optimizing the parameters of the PID control.
- Analysis of the different responses of the system to modifications of PID parameters.
- Study of the disturbances in a controlled system with a PID controller.
PID Magnetic Levitation Control and Regulation Unit (RYC-CLM):
- Characterization of the electrical subsystem.
- PID control of the electrical subsystem.
- PID control of the ball position.
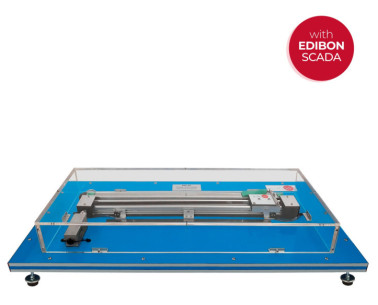
PID Position Control and Regulation of a Motor Unit (RYC-CP):
- Characterization of a speed control system.
- PID control of the motor speed.
- Characterization of a position control system.
- PID control of the carriage position.
PID Control and Regulation of Light Intensity Unit (RYC-I):
- Familiarization with the main unit components.
- Study the photoresistor characteristics.
- Study the phototransistor characteristics.
- Study the photodiode characteristics.
- Analyze the transient response of the system.
- Analyze the system response in open loop.
- Analyze the system response in closed loop.
- Luminosity control with a P, PI, PD and PID controller.
- Setting and optimizing the parameters of the PID control.
- Analysis of the different responses of the system to modifications of PID parameters.
- Study of the disturbances in a controlled system with a PID controller.
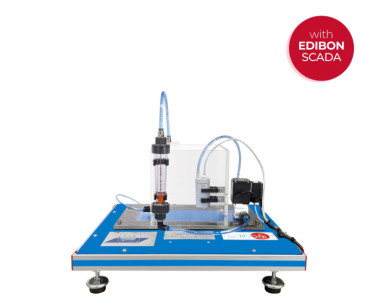
PID Level Control and Regulation Unit (RYC-N):
- Characterization of the level in a tank.
- Control of the level of a tank using a PID controller.
- Disturbance rejection using a PID controller.
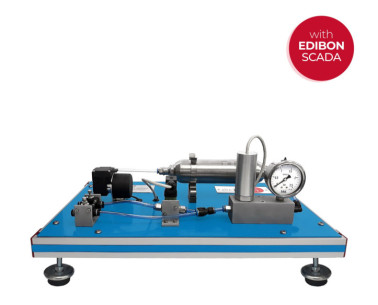
PID Control and Regulation of Pressure Level Unit (RYC-P):
- Characterization of the PID Control and Regulation of Pressure Level Unit (RYC-P).
- PID Control and Regulation of Pressure Level Unit (RYC-P) with a PID control.
PID Control and Regulation of pH Level Unit (RYC-pH):
- Familiarization with the main unit components.
- Analyze the transient response of the system.
- Analyze the system response in open loop.
- Analyze the system response in closed loop.
- pH level control with a P, PI, PD and PID controller.
- Setting and optimizing the parameters of the PID control.
- Analysis of the different responses of the system to modifications of PID parameters.
- Study of the disturbances in a controlled system with a PID controller.
PID Control and Regulation of an Inverted Pendulum Unit (RYCPI):
- Characterization of a speed control system.
- PID control of the motor speed.
- Characterization of a position control system.
- PID control of the cart position.
- PID control of the pendulum position.
PID Control and Regulation of a DC Servomotor Unit (RYC-SM):
- Characterization of a DC motor (speed).
- DC motor speed control with a PID controller: open-loop.
- DC motor speed control with a PID controller: closed-loop.
- Characterization of a DC motor (position).
- DC motor position control with a PID controller: closed-loop.
PID Temperature Control and Regulation Unit (RYC-TE):
- Characterization of the temperature in a tank.
- Control of the temperature of a tank using a PID controller.
PID Temperature Control and Regulation of Water Flow Unit (RYC-TAG):
- Characterization of the PID Temperature Control and Regulation of Water Flow Unit (RYC-TAG).
- Water Flow Temperature Control with a PID control.
PID Temperature Control and Regulation of Air Flow Unit (RYCTAR):
- Characterization of the PID Temperature Control and Regulation of Air Flow Unit (RYC-TAR).
- PID Temperature Control and Regulation of Air Flow Unit (RYC-TAR) with a PID control.
 Cookies首选项
Cookies首选项

 目錄
目錄
 比赛规格
比赛规格