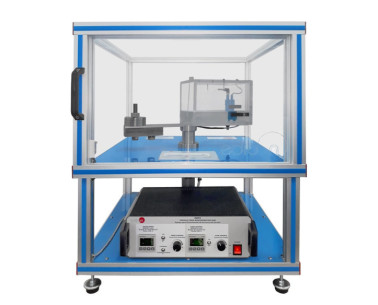
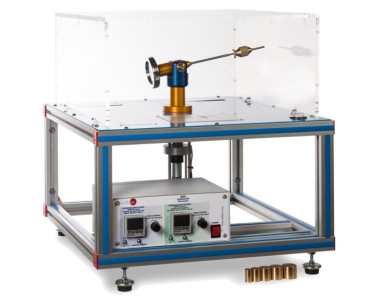
El Equipo de Balanceo de Masas Reciprocantes, Controlado desde Computador (PC), "MBMRC", es un equipo de sobremesa que permite investigar y examinar las masas libres y los momentos de un motor reciprocante con un solo cilindro, con dos cilindros o con cuatro cilindros.
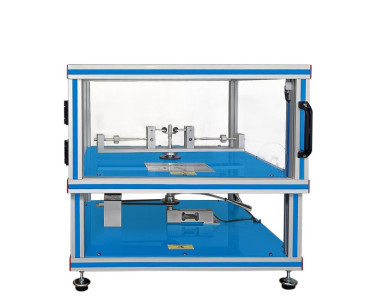
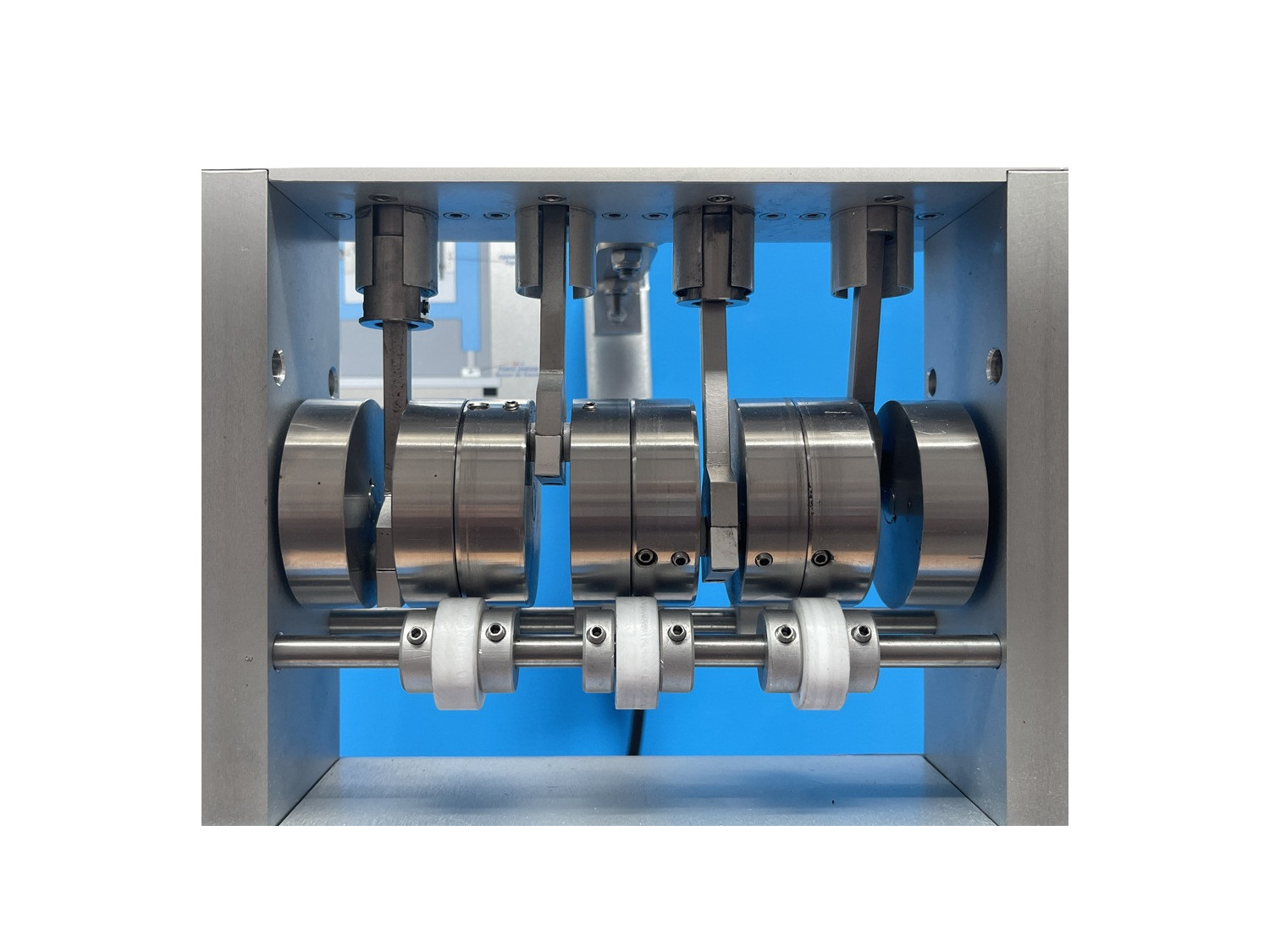
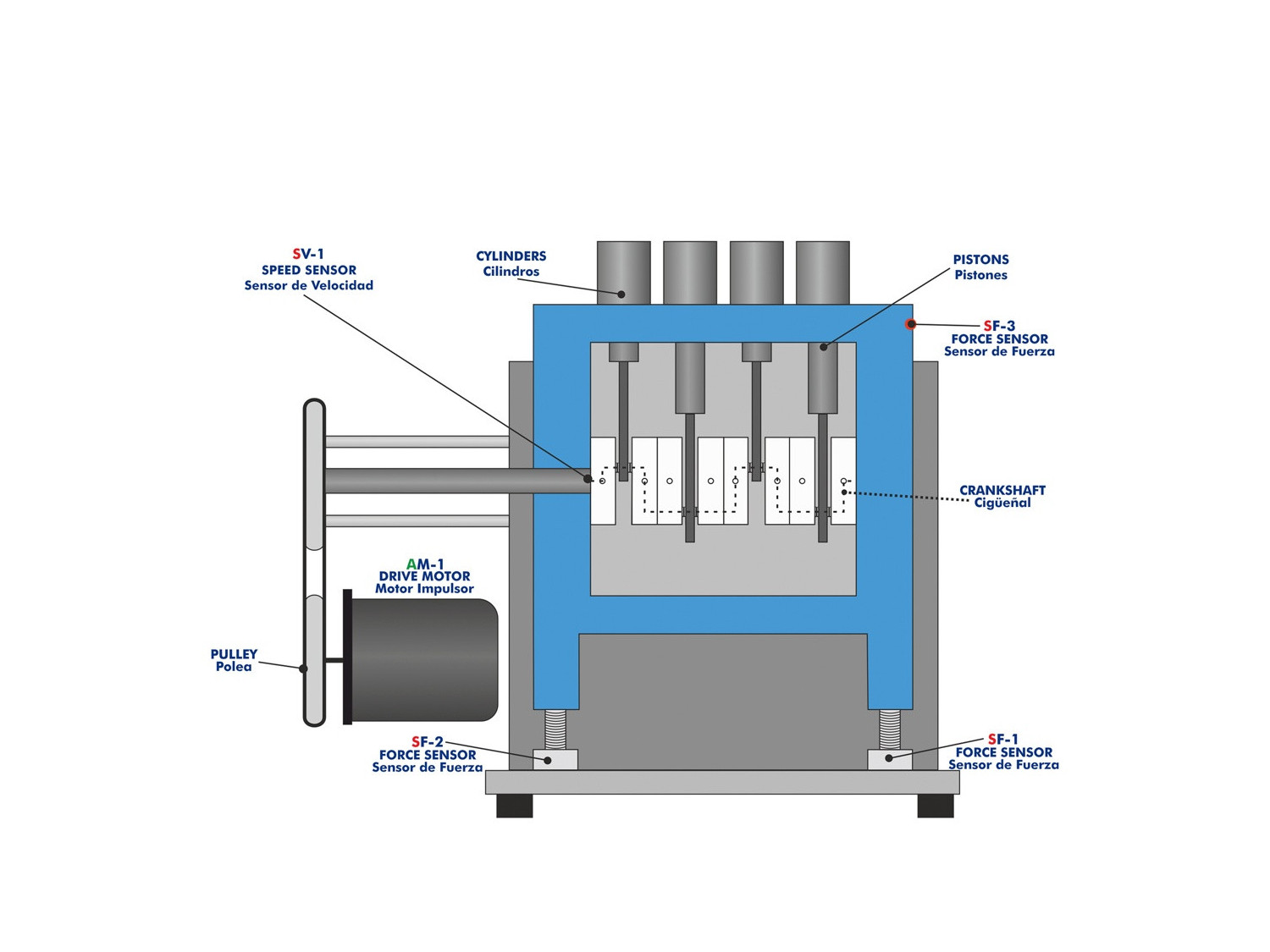
Una estructura robusta sujeta un soporte que sostiene un modelo de motor de cuatro cilindros en línea. El modelo del motor tiene un cigüeñal, bielas, rodamientos, pistones y un bloque de cilindros.
El cigüeñal tiene secciones ajustables y los estudiantes pueden girar cada una de las secciones en relación a las demás para cambiar los ángulos de manivela. Para cada cilindro, el ángulo entre manivelas puede ser ajustado continuamente.
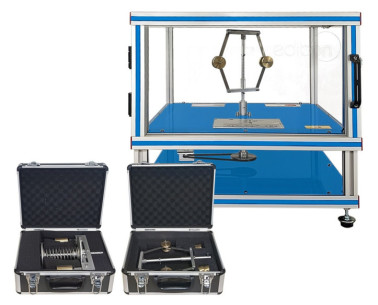
Las masas oscilantes pueden modificarse mediante el uso de pesos adicionales en el pistón. Cada pistón incluye un orificio para que los estudiantes puedan añadir o retirar los pesos. Estos pesos son fijados con seguridad durante el funcionamiento del motor.
El cigüeñal del motor funciona mediante un motor controlado desde computador. La velocidad se mide mediante un sensor de velocidad. Las fuerzas y los momentos son medidos mediante tres sensores de fuerza situados en los apoyos del equipo.
Una carcasa de protección transparente protege a los estudiantes del movimiento del cigüeñal y permite la visibilidad de las prácticas y los componentes del equipo. Esta carcasa incluye un interruptor, que permite parar el motor automáticamente si la carcasa está abierta.
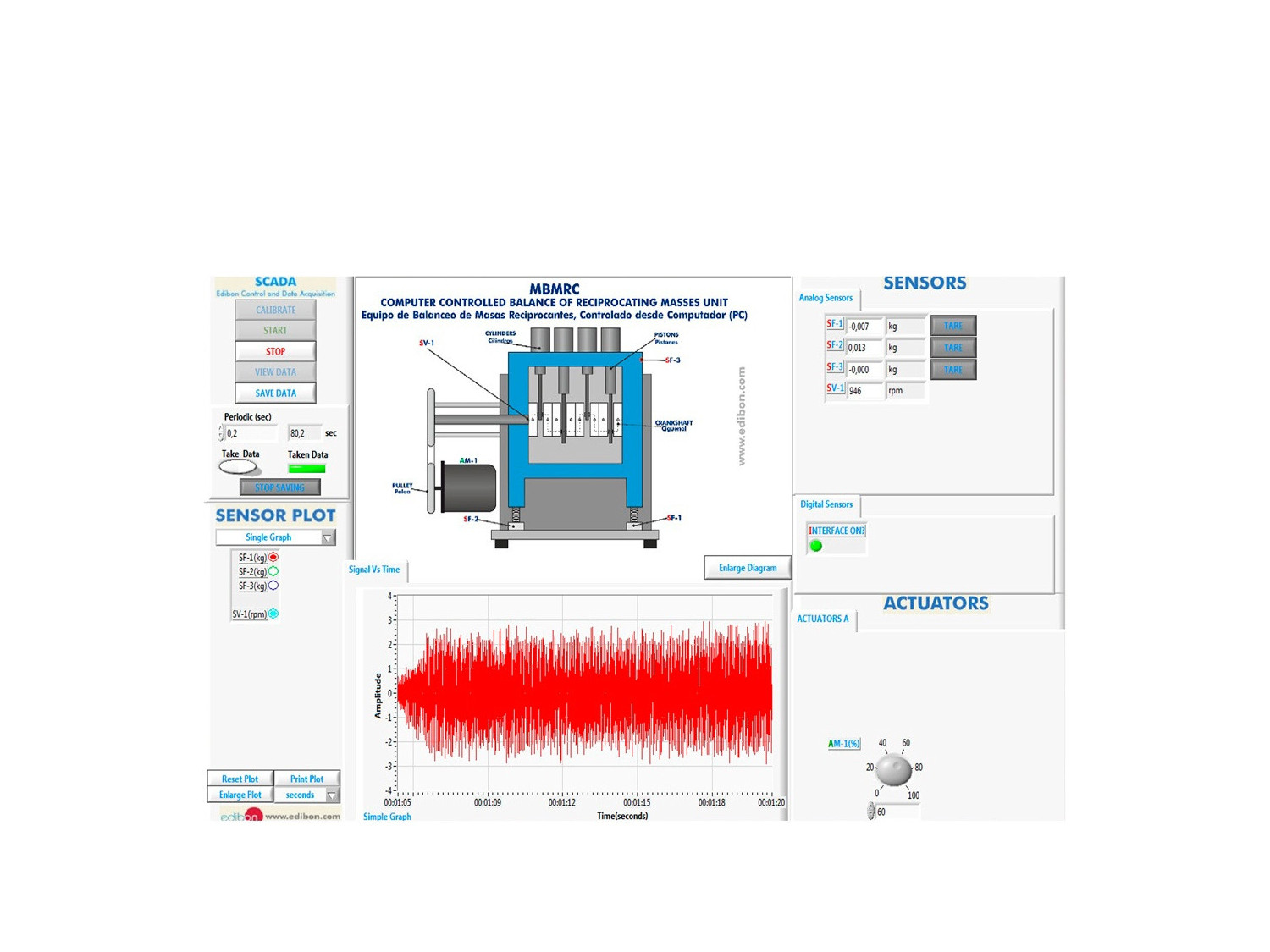
Este Equipo Controlado desde Computador se suministra con el Sistema de Control desde Computador (SCADA) de EDIBON, e incluye: el propio Equipo + una Caja-Interface de Control + una Tarjeta de Adquisición de Datos + Paquetes de Software de Control, Adquisición de Datos y Manejo de Datos, para el control del proceso y de todos los parámetros que intervienen en el proceso.
 Preferencias sobre cookies
Preferencias sobre cookies










 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso















{kind=link}
{kind=link}
{kind=link}
{kind=link}