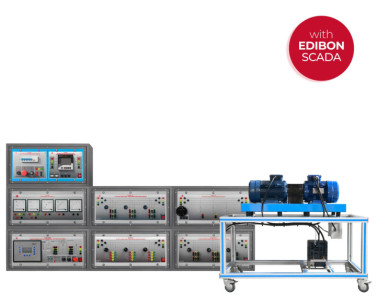
El Equipo de Servosistemas Industriales (motores de CA) Avanzado, Controlado desde Computador (PC), "SERIN/CA", ha sido diseñado por EDIBON para realizar el estudio detallado de los tres métodos principales de control utilizados en servomecanismos: control de posición, control de velocidad y control de par.
El control de posición permite desplazar cargas entre puntos definidos con gran precisión, el control de velocidad regula la velocidad de giro o desplazamiento en función del tiempo, y el control de par asegura una fuerza de giro constante, fundamental en aplicaciones con variaciones de carga.
El acceso práctico a estos tres modos permite a los estudiantes adquirir conocimientos aplicados sobre cómo se implementan en sistemas reales de automatización.
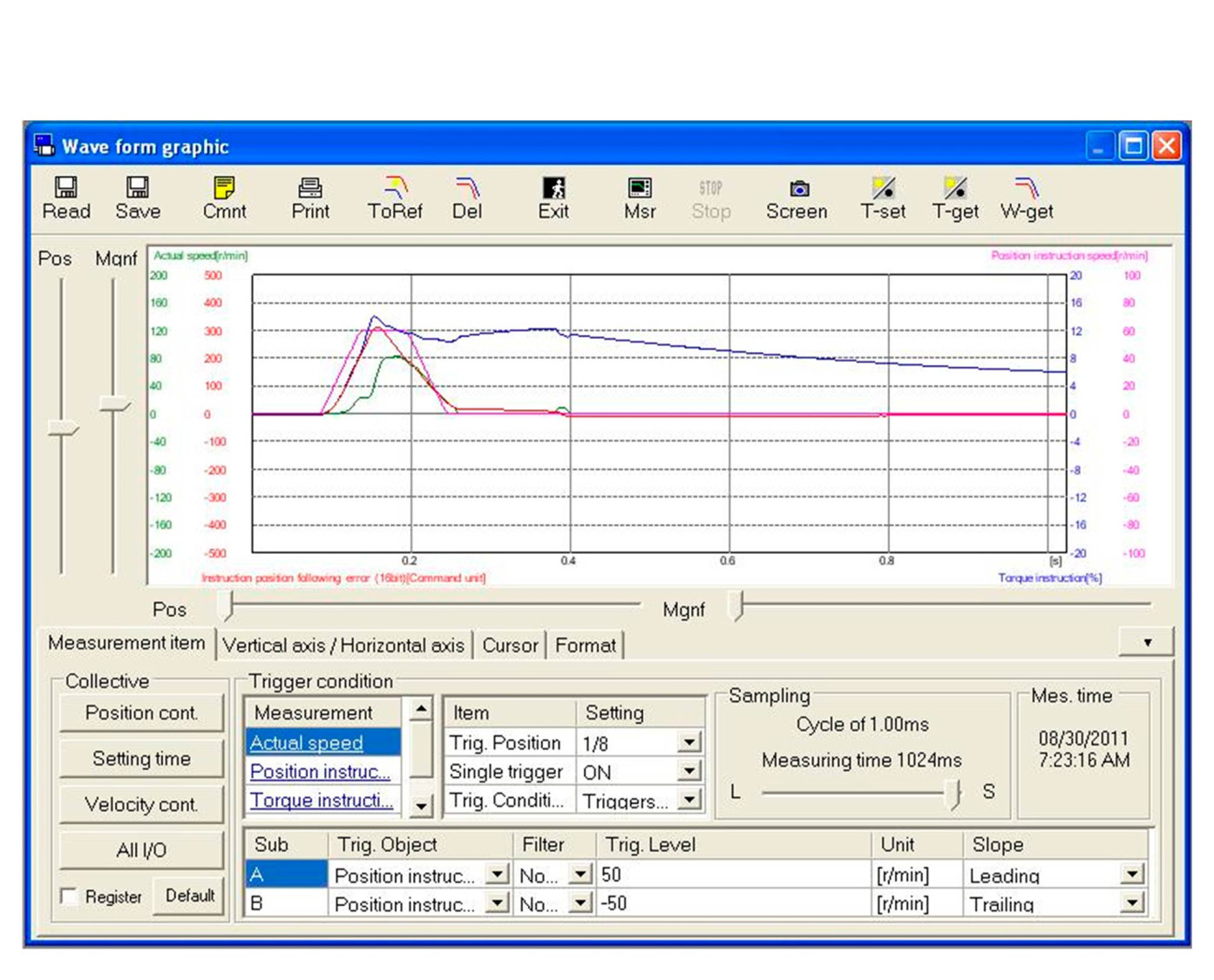
Con el "SERIN/CA", los alumnos pueden observar en tiempo real cómo se aplican estos principios, experimentando con distintos modos de control y configuraciones del equipo.
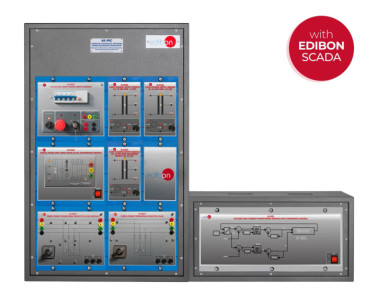
Para facilitar el aprendizaje práctico, el "SERIN/CA" incluye las siguientes secciones que emulan y controlan diferentes elementos de un sistema servo real. Entre ellos se encuentran:
- Emulador decodificador (encoder): proporciona señales de retroalimentación para el control de posición mediante canales A, B y Z.
- Potenciómetros analógico y digital: permiten realizar prácticas tanto de control de velocidad (PTC1) como de control de posición (PTC2).
- Entradas y salidas digitales: 6 entradas y 3 salidas que permiten modificar funciones del equipo y visualizar su estado.
- Entradas y salidas analógicas: utilizadas para el control de velocidad y par, así como para la retroalimentación de señales.
- Interruptores y pulsadores digitales: permiten activar entradas o interactuar con sistemas externos como controladores lógicos programables (PLC).
- Salida a relé: se puede usar para generar señales de alarma o controlar dispositivos externos.
- Botón de reset: permite reiniciar el sistema y cargar nuevos parámetros enviados desde el software.
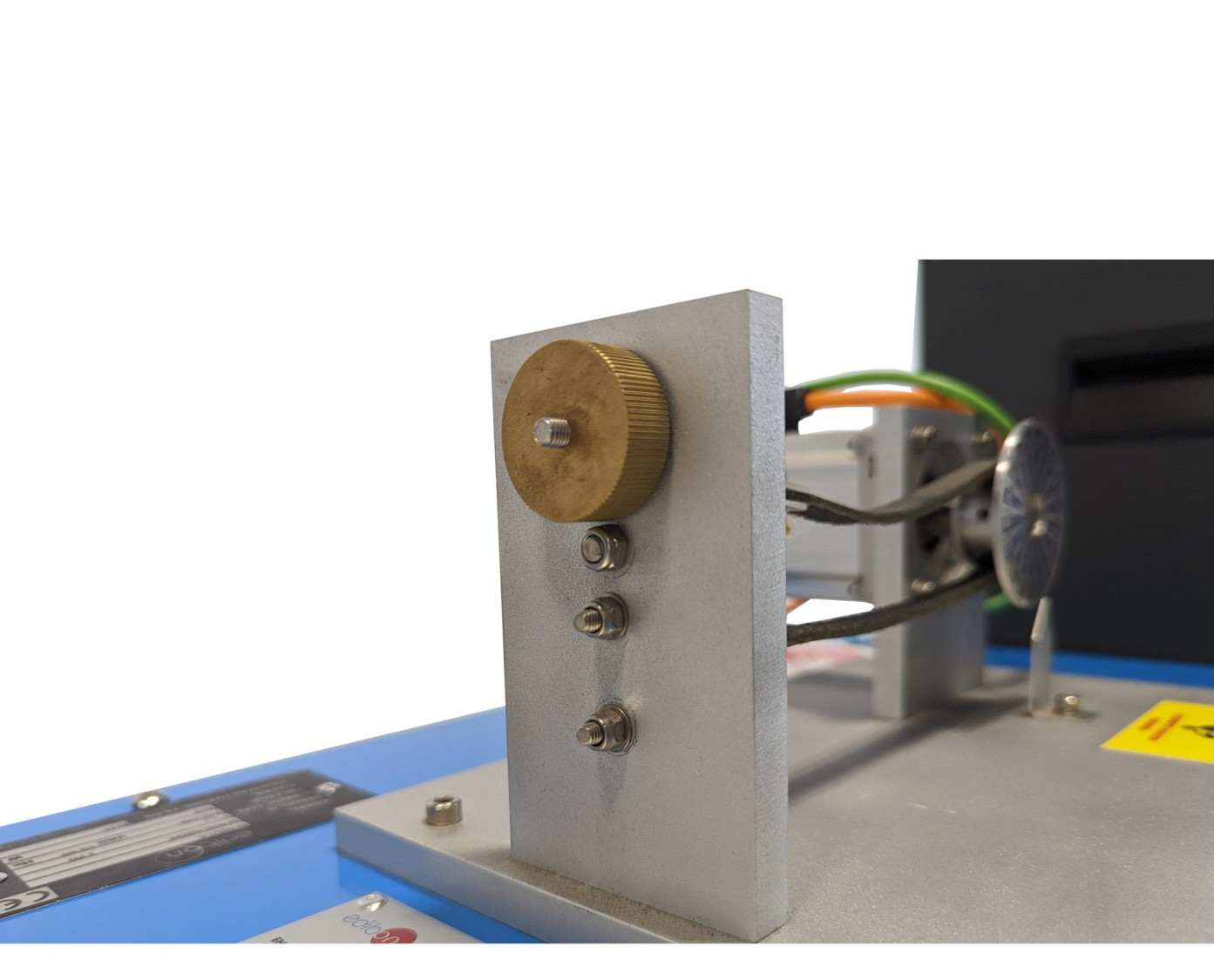
- Motor de CA con freno: el freno ajustable permite simular distintas condiciones de carga, haciendo las prácticas más realistas.
La arquitectura y el entorno de control basado en computador permiten realizar un amplio rango de prácticas, desde las más básicas hasta ejercicios avanzados de integración y control en lazo cerrado.
El equipo es ideal tanto para centros de formación profesional como para universidades e instituciones técnicas que buscan una solución robusta, versátil y completamente orientada a la práctica.
 Preferencias sobre cookies
Preferencias sobre cookies
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 - SERIN/CA")
 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso












 - SERIN/CA")
{kind=link}
{kind=link}