El Equipo Básico de Servosistemas para Motores CC, "SERIN/CCB", se trata de un equipo para el estudio de servosistemas de pequeña potencia. Es un entrenador de control de velocidad de motores de corriente continua de pequeña potencia que incorpora un simulador de averías.
Este equipo es una versión básica del Equipo de Servosistemas Industriales (motores de CC) Avanzado, Controlado desde Computador (PC), "SERIN/CC", siendo aconsejado para el estudio introductorio a los sistemas de control en lazo abierto y cerrado.
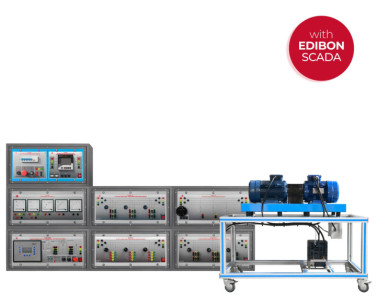
El equipo se compone de unidad electromecánica con motor DC y tacómetro, acoplados mediante volante de inercia, montados sobre caja de acero donde se contiene la etapa de potencia y la tarjeta de adquisición y control, así como de un software de control y supervisión.
Este conjunto permite control en lazo abierto y cerrado, generación y control de consigna, generador de rampa, amplificador de error proporcional y PID, limitador de corriente, modulador PWM, control de inversión de giro, control de parada y arranque, control de freno y simulador de averías, que permite introducir un considerable numero de disfunciones para que los alumnos diagnostiquen su naturaleza y localicen la causa, sin riesgo de que provoquen averías en el equipo.
El control de la unidad puede realizarse de forma manual, sobre el propio equipo, de forma básica o de una manera avanzada mediante el software de control SCADA, este ultimo puede realizar dos tipos de control que son: Control en Lazo Abierto y Control en Lazo Cerrado.
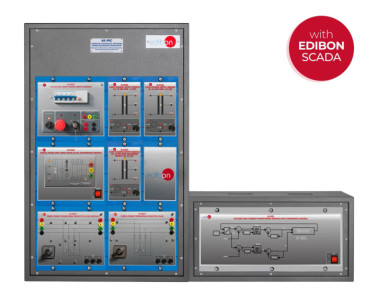
La unidad base consta de cuatro partes diferenciadas que podemos ver en la carátula de la misma:
- Zona de conexionado para motor corriente continua y tacómetro.
- Control de velocidad manual o desde PC. En esta zona existe un interruptor tipo palanca para seleccionar el tipo de control.
- Zona PID. En esta zona podremos manipular mediante tres potenciómetros el valor de las constantes que participan en un PID, constante proporcional, Integrativa y Derivativa.Esta funcionalidad solo está disponible para modo PC, es decir, el interruptor de palanca del control de velocidad debe estar en modo PC.
- Zona de control de giro y parada. Nos permite cambiar el sentido de giro y parar el motor.
Circuitos integrados sencillos para poder analizar de modo independiente cada etapa funcional.
Componentes a la vista y con hembrillas de 2 mm. Para la medida de tensiones y señales.
El control se hace mediante impulsos PWM y la etapa de potencia esta configurada con transistores MOSFET.
 Preferencias sobre cookies
Preferencias sobre cookies

 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso