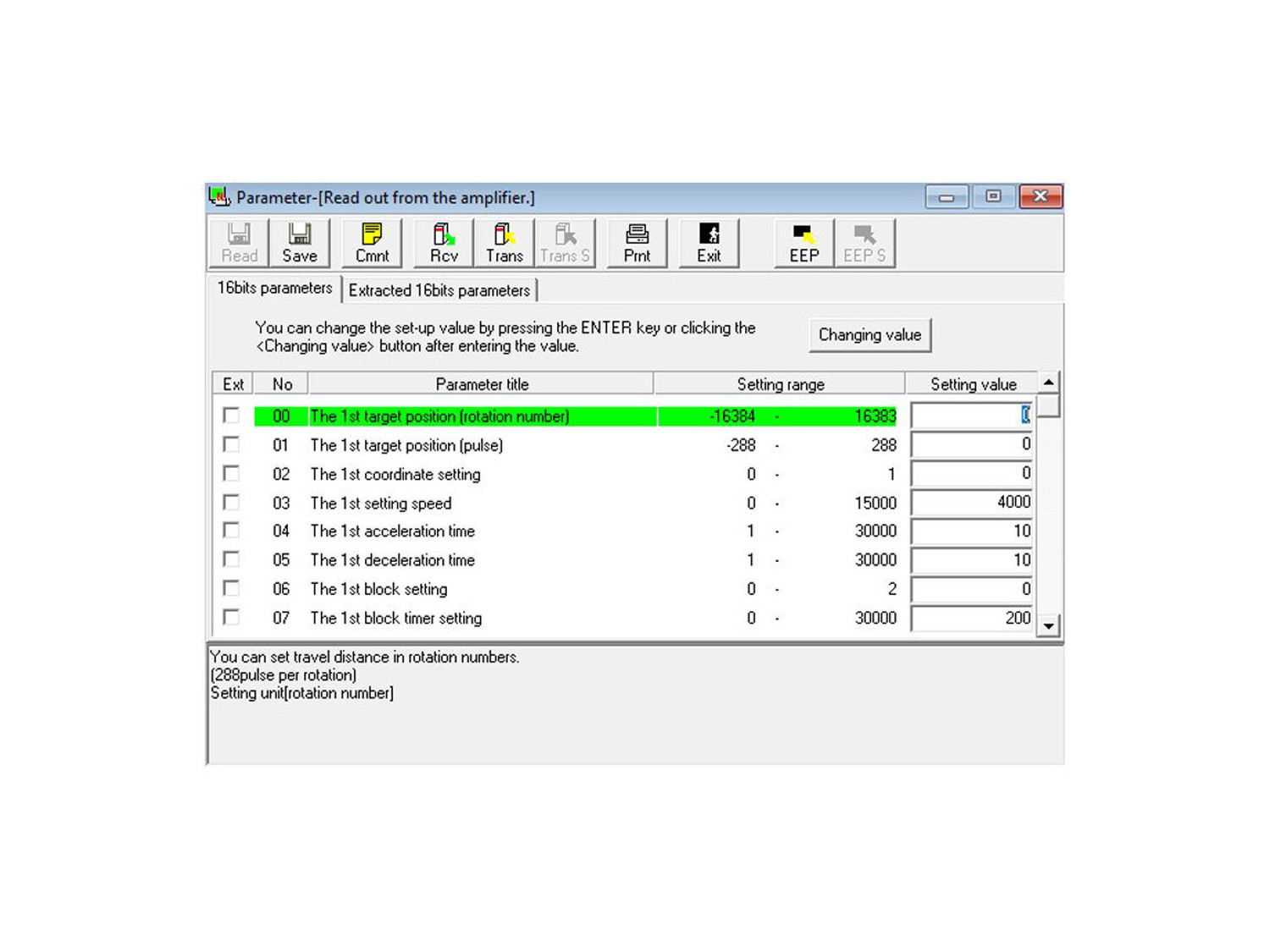
The Brushless Motor Industrial Application, "AE-BMI", is designed to perform the most common control used in the industry: the position control. The "AE-BMI" application allows the student to configure up to four positions with all the parameters involved when the system has to reach each of these positions: relative or absolute positioning, speed value, acceleration and deceleration of the system when it approaches the desired position, digital input signal to activate every position, setting the home position, etc.
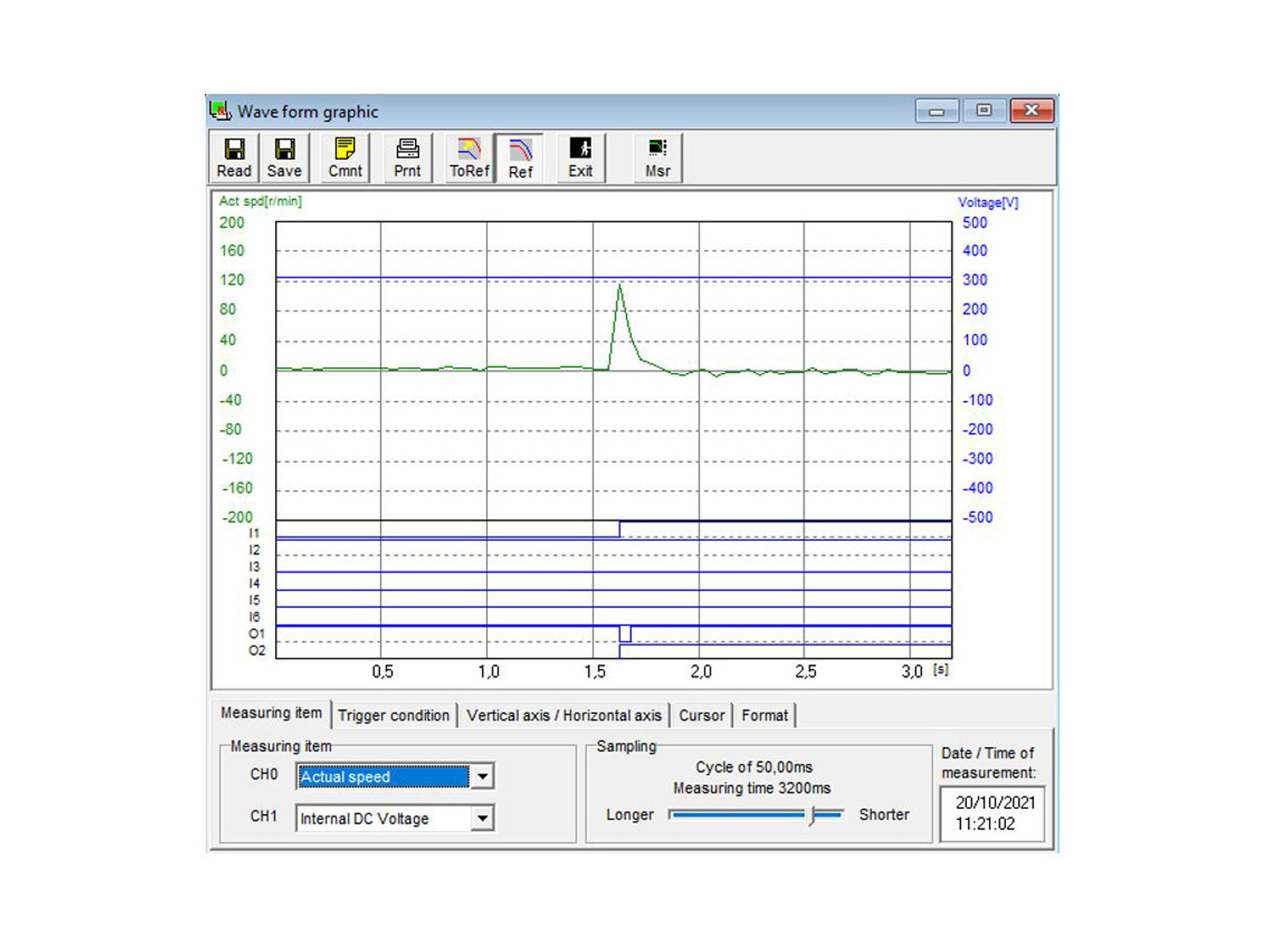
The configuration is done through the software of the driver which controls the motor. Since "AE-BMI" is a computerized system, appart from using the computer to configure the movement parameters, it allows to visualize the state of the digital input and output signals, the speed response of the motor, the alarms state, the torque value, etc.
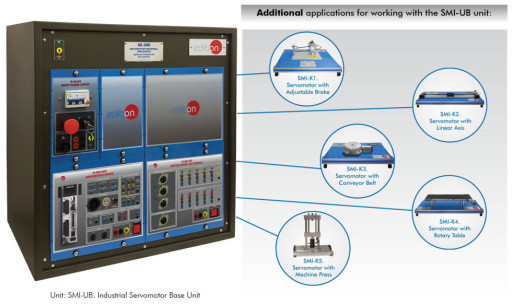
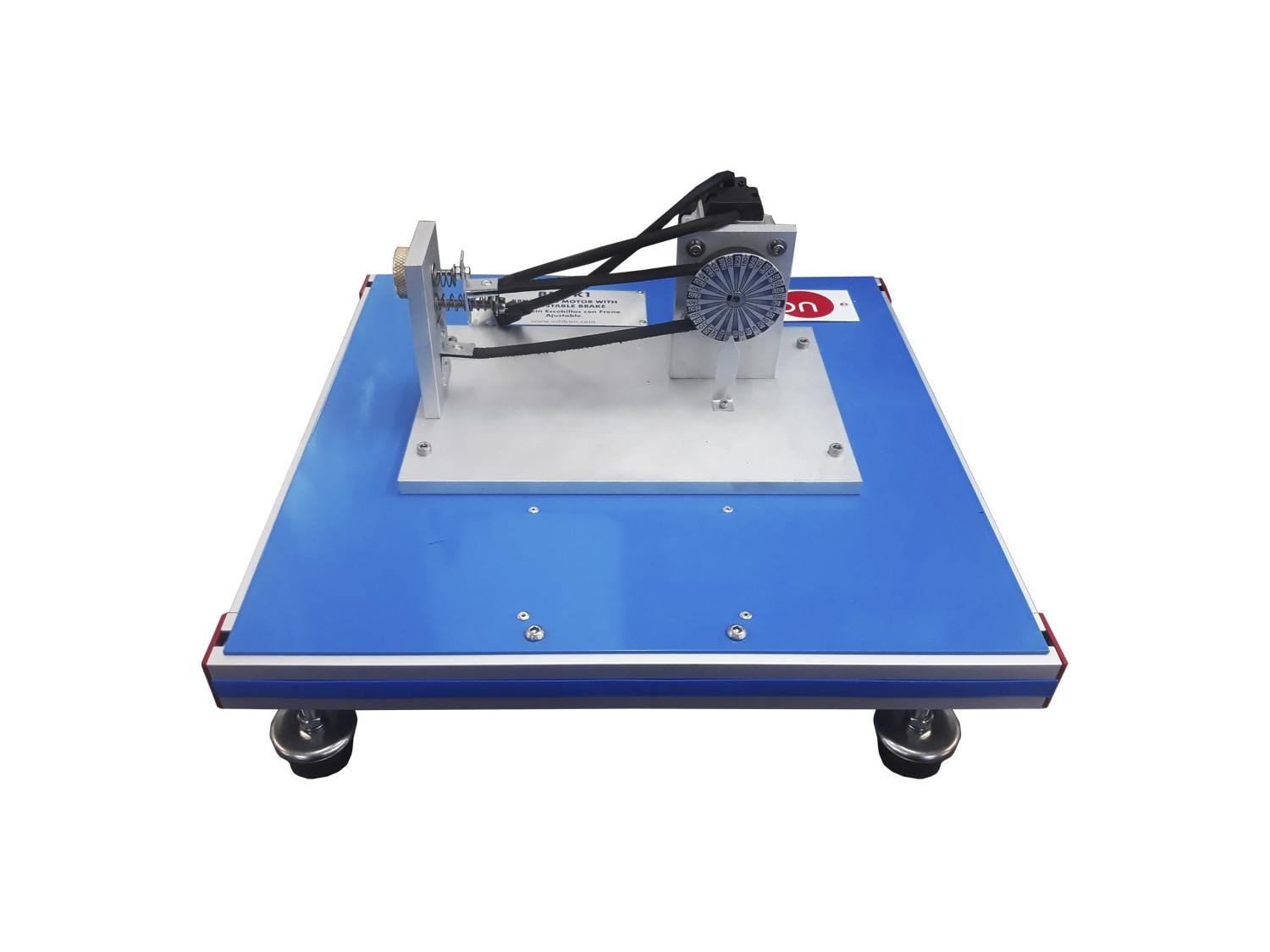
The "BMI-UB" is the base unit of the "AE-BMI". To work with the "BMI-UB" other required elements are necessary. The required elements available are real examples of motion control systems: a servomotor with adjustable brake and a servomotor with linear axis system. The base unit includes the driver, control system, to control the motor included in the additional application.
The "AE-BMI" also allows the student to work with a programmable logic controller, PLC. The PLC receives the signals of the different sensors installed in each additional application and controls the brushless motor system through digital and pulsed signals, allowing the addition of a PLC control to a brushless motor system.
 Preferências de cookies
Preferências de cookies










 Catálogo
Catálogo
 Especificações de Concurso
Especificações de Concurso










{kind=link}
{kind=link}
{kind=link}
{kind=link}