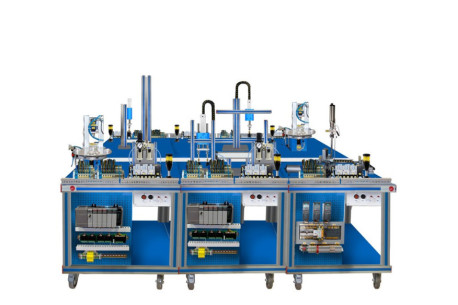
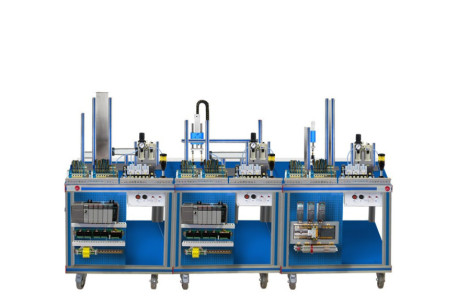
El Sistema de Fabricación Flexible de Transporte, Clasificación, Selección y Manipulación Neumática, "AE-PLC-FMS5", es un sistema configurable y altamente adaptable, diseñado para el estudio y aplicación de los principios de automatización avanzada en el contexto de la Industria 4.0 e Industria 5.0. Este equipamiento integra tecnologías clave, como el control automatizado, la interconexión de dispositivos mediante redes inteligentes, programación en PLC de las cadenas de montaje y el análisis de datos en tiempo real, permitiendo a los usuarios explorar las capacidades de la manufactura digitalizada y conectada que caracterizan la Cuarta Revolución Industrial y dan pie a la Quinta Revolución Industrial.
Consta de nueve estaciones interconectadas que realizan tareas específicas de alimentación, ensamblaje, verificación (dimensión, material y color), prensado, montaje y almacenamiento de piezas. Cada una de estas estaciones requiere de su propio PLC de la marca que se escoja (PANASONIC, SIEMENS, ALLEN BRADLEY, MITSUBISHI y/o OMRON) permitiendo a los usuarios explorar cómo se aplican conceptos avanzados de control y producción en una línea de fabricación automatizada, donde el flujo de trabajo es coordinado por un sistema de PLC central requerido (misma marca que la escogida para las estaciones) y una red Ethernet, haciendo del "AE-PLC-FMS5" un recurso de aprendizaje completo para aquellos interesados en la ingeniería de automatización y manufactura flexible.
Estas son las estaciones incluidas:
- La Estación de Distribución de Piezas, "AE-PLC-DS": Proporciona las piezas de diferentes colores, materiales y alturas a la Estación de Identificación, "AE-PLC-SIP".
- En la Estación de Clasificación, "AE-PLC-CF", se seleccionan aquellas piezas con los patrones de color, material y altura que se requieran y el resto de piezas pasan a ser descartadas.
- Las piezas seleccionadas, se incorporan a la Estación de Transporte Lineal, "AE-PLC-T" donde se van colocando las piezas válidas y se transportan hasta la siguiente estación.
- En la primera Estación de Manipulación Neumática, "AE-PLC-MAN": Uno de los manipuladores neumáticos toma las piezas de la Estación de Transporte Lineal, AE-PLC-T" y las coloca en la Estación de Mesa Rotatoria: Control de Procesamiento Automático (estudio de taladrado y pulido), "AE-PLC-MR3", para ensamblar una pieza auxiliar dentro de la pieza base. Luego, el manipulador neumático devuelve las piezas al sistema de transporte lineal para continuar el proceso.
- En el siguiente proceso interviene la Estación de Brazo Robótico, "AE-BR": El brazo robótico recoge diferentes piezas desde la Estación de Alimentación para Múltiples Piezas, "AE-PLC-MA" y las monta dentro de la pieza base que se encuentra en la Estación de Transporte Lineal, "AE-PLC-T".
- Aquellas piezas que son finalizadas pasan a la Estación de Almacenaje Vertical, "AE-PLC-ALV": Las piezas finalizadas son almacenadas temporalmente en este sistema hasta que el operario las requiere. El sistema incluye un almacén vertical y un manipulador tridimensional XYZ que recoge las piezas del sistema de transporte lineal y las ubica en la posición deseada del almacén. Cuando se necesita una pieza, el manipulador XYZ la recoge y la devuelve al sistema de transporte lineal.
- Una segunda Estación Neumática de Manipulación, "AE-PLC-MAN", la cual coge las piezas de la Estación de Transporte Lineal, "AE-PLC-T", y las coloca en la Estación de Clasificación, "AE-PLC-CF". Esta estación separa las piezas dependiendo de las especificaciones configuradas por el operario.
El equipo permite a estudiantes y profesores sumergirse en conceptos fundamentales de la automatización industrial. A través de su uso los estudiantes adquieren habilidades prácticas en el diseño y la operación de sistemas automatizados, lo que les brinda una comprensión profunda del trabajo coordinado entre las distintas estaciones de una línea de producción real. Este sistema configurable ha sido cuidadosamente diseñado para que cada una de sus estaciones cumpla con funciones específicas que simulan procesos reales en la industria.
El Software para la Simulación de Sistemas de Automatización recomendado, "AE-AS", permite simular en 2D y 3D los procesos industriales y ofrece control y supervisión completo, permitiendo a los usuarios experimentar con software de automatización en un entorno seguro.
 Preferencias sobre cookies
Preferencias sobre cookies

 Catálogo
Catálogo
 Especificaciones de Concurso
Especificaciones de Concurso