Regulation and control theory is divided into two major divisions in, namely, classical and modern. The implementation of classical controller designs as compared to systems designed using modern control theory is easier and these controllers are preferred in most industrial applications. The most common controllers designed using classical control theory, are PID controllers.
The Computer Controlled Teaching Unit for the Study of Regulation and Control, "RYC", allows the students to simulate an integrator system, a first order system and a second order system and regulate them with a PID controller or Lead and Lag compensator. The unit also allows to simulate perturbations and offsets to analyze the response of the system.
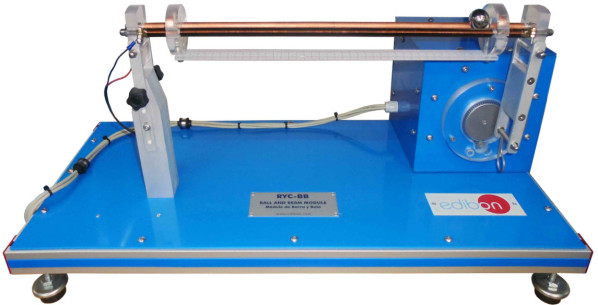
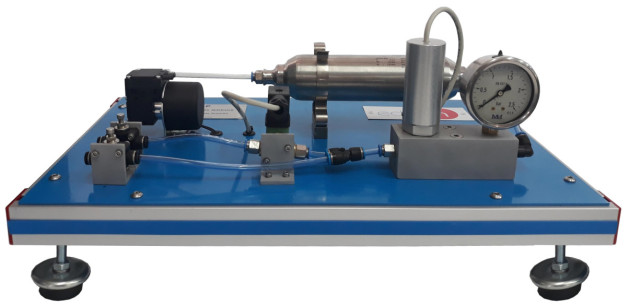
A wide range of applications: DC Servo Motor Module, Ball and Beam Module, etc. for working with the "RYC" unit are available to study a real control systems response to complement the Study of regulation and control in real time.
 Preferensi cookie
Preferensi cookie

 Katalog
Katalog
 Spesifikasi Kontes
Spesifikasi Kontes